人形机器人要想实现拟人化运动、轻量化设计与长期稳定运行,对关节电机的性能有着严苛的要求。
总体来看,人形机器人电机需满足四大核心标准:
高功率与高扭矩密度:适配狭小关节空间与轻量化需求;
高精度、高响应特性:保障拟人动作精准可控;
小型化、轻量化设计:降低整机自重与运动惯量;
高可靠性:适配长期复杂工况的持续运行。
当前,人形机器人领域主流应用的电机类型为直流有齿槽无刷电机、空心杯电机和无框力矩电机三类,各有不同适配场景。
空心杯电机采用无铁芯转子与空心杯形绕组结构,消除了传统电机的涡流损耗和磁滞损耗。空心杯电机的核心性能优势包括:效率≥80%;转速可达10000rpm以上,响应速度比传统电机快3-5倍;体积小(直径低至6mm)、重量轻、惯量低。凭借优异的灵敏性,空心杯电机主要适配机器人灵巧手、小型精密关节,典型应用是特斯拉Optimus人形机器人手指关节,通过拇指双电机、其余四指单电机的配置,可完成抓握鸡蛋等精细化、高难度柔性动作。

来源:特斯拉
无框力矩电机采用无边框模块化设计,转子可直接装配于机器转轴、定子内嵌设备外壳,结构集成度极高。相较于传统电机,无框力矩电机核心性能优势包括:
结构紧凑,体积减少40%,重量降低30%;峰值扭矩可达3500N・m,搭配谐波减速器可实现1:1000以上减速比;耐高温,持续工作温度可达180℃。无框力矩电机可适配人形机器人旋转/线性关节。

来源:科尔摩根
直流无刷电机依托无电刷结构,依靠定子绕组与转子永磁体配合驱动,具备高转速、低维护的特点,转速区间可达10000-20000rpm。但其短板较为明显,扭矩密度仅30-50N·m/kg,低速运行控制精度不足,因此仅作为辅助动力,可应用于机器人轮毂、人形机器人腰部旋转、手臂摆动等对精度和扭矩要求较低的场景。
新技术方面,轴向磁通/谐波磁场电机有望在人形机器人中得到应用。
轴向磁通电机(磁通路径轴向)具备高功率密度、轻量化,空间利用率和效率优势显著等优势,理论上比较适合人形机器人。
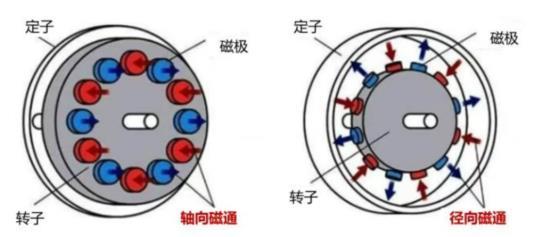
径向电机与轴向电机示意图 来源:国泰海通证券研究所
不过现阶段轴向磁通电机技术尚未成熟,规模化落地存在诸多壁垒。该电机电磁计算需依托三维建模,设计研发复杂度极高,核心零部件加工与装配精度要求严苛,量产难度大;同时存在散热路径长、轴向力平衡难把控等问题,影响设备运行稳定性,且行业暂无成熟统一的标准体系,制约了技术迭代与普及。
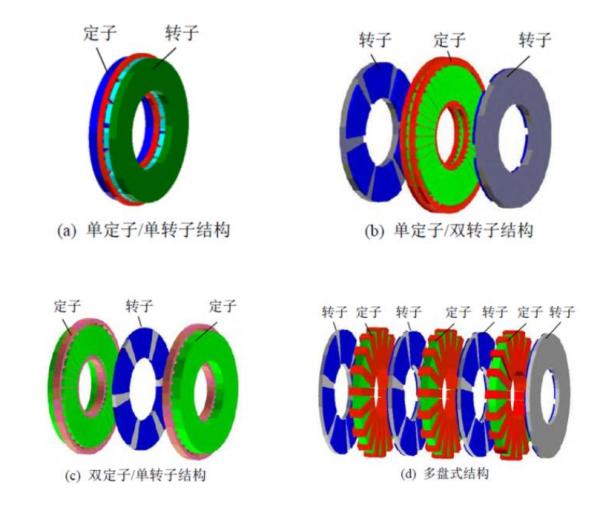
轴向电机组合结构
除轴向磁通电机外,谐波磁场电机作为非标准化分类的技术探索方向,其设计核心基于磁场谐波特性,依托磁场调制效应实现更大的功率密度,如今也开始尝试应用于人形机器人场景。
整体而言,当前人形机器人关节电机市场仍以技术成熟、适配性稳定的空心杯电机、无框力矩电机、直流无刷电机为核心主力,各司其职满足机器人不同关节的运动需求。而轴向磁通电机、谐波磁场电机等新兴技术,凭借极致的功率密度与轻量化潜力,成为行业突破现有电机性能瓶颈的关键方向。
参考来源:
各企业官网,官微
国泰海通证券《人形机器人核心零部件技术壁垒与发展路径》