灵巧手作为机器人系统中最接近人手功能的执行机构,凭借其高自由度、强可控性及多模态感知能力,正在从实验室研究逐步走向实际应用。随着传感技术、控制算法及智能规划的持续发展,灵巧手已能够在复杂、不确定的环境中完成稳定抓取、精密操作和人机协作等任务。
多指灵巧手的应用涵盖工业制造、服务业、日常生活等多个领域。
工业制造
工业制造是多指灵巧手最早、最核心的应用场景之一。凭借高自由度的机械结构与柔性灵活的抓取性能,多指灵巧手可高效完成精密装配、零部件转运、手持工具作业、复杂曲面加工等各类工业任务,能够适配不同形态、规格的工件,精准完成姿态微调与多触点协同操作,适配工业生产的多样化作业需求。
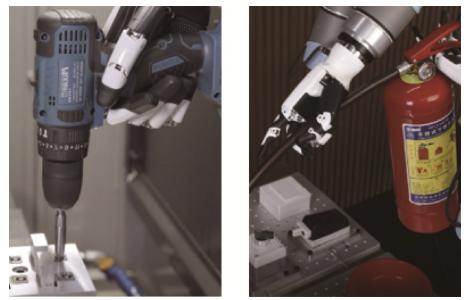
来源:因时机器人
结合力觉、触觉与视觉传感,多指灵巧手能够在装配和加工过程中感知物体状态、调整抓取策略,并通过深度学习和强化学习算法实现自主抓取、姿态优化及操作路径规划。这些能力使灵巧手能够在柔性生产、复杂零件装配及小批量多品种制造中发挥重要作用,为智能制造系统提供关键的执行端能力。
服务业
在服务业与日常生活辅助领域,多指灵巧手的应用持续拓展,有效提升了服务机器人在非结构化场景的作业灵活性与人机交互自然度。

来源:越疆科技
家庭、公共服务等场景环境复杂多变,对机器人操作的柔顺性、安全性要求极高。灵巧手凭借高运动自由度、多触点精准控制与良好的柔顺性,可高效完成各类多样化服务作业。家庭应用场景中,灵巧手融合视觉识别、语义理解与用户意图识别技术,可依据实际任务需求自主规划作业策略,实现安全、柔和的人机交互操作。其轻量化、软体化的结构设计,大幅提升了设备在动态复杂环境中的安全性与环境适配能力,使其在智能家居、养老护理、餐饮服务、公共辅助等多个领域具备广阔的应用前景。

Eagle Shoal灵巧手:用于家政服务
随着低功耗控制技术、触觉感知技术及智能学习算法的持续迭代升级,未来服务型灵巧手将实现更为自然、高效的人机协作,逐步成为人们日常生活中不可或缺的智能执行核心单元。
医疗康复
在医疗康复领域,多指灵巧手扮演着假肢、康复训练及远程操作等多重角色。其精细的力控性能与丰富的感知能力,使其能够在与人体直接交互时实现安全、柔顺的运动控制,满足个体化的康复需求。通过集成力觉、触觉和生肌电信号感知系统,灵巧手可以准确捕捉用户意图,实现自然化的动作响应与反馈调节,从而提升康复训练的主动性与精度。在远程医疗与辅助手术中,灵巧手通过高精度控制与触觉反馈技术,能够再现人类手部的精细操作,为微创干预和远程操控提供重要支持。

中科大的19自由度假肢灵巧手
特殊环境
多指灵巧手在核工业、深海探测、太空作业及灾害救援等各类高危、极端作业场景中也具备突出的应用潜力。依托远程操控与自主决策双重作业模式,多指灵巧手可在强辐射、超高压、微重力等恶劣危险环境下稳定开展精细化操作。其搭载的多模态感知系统与力觉反馈技术,能够精准感知外部环境信息与作业物体的状态参数,保障操作过程的安全性与稳定性。同时,灵巧手具备良好的柔顺特性与可编程控制优势,可在特殊极端环境中完成设备装配、设施维护、样本采集、障碍清理等一系列复杂作业任务。
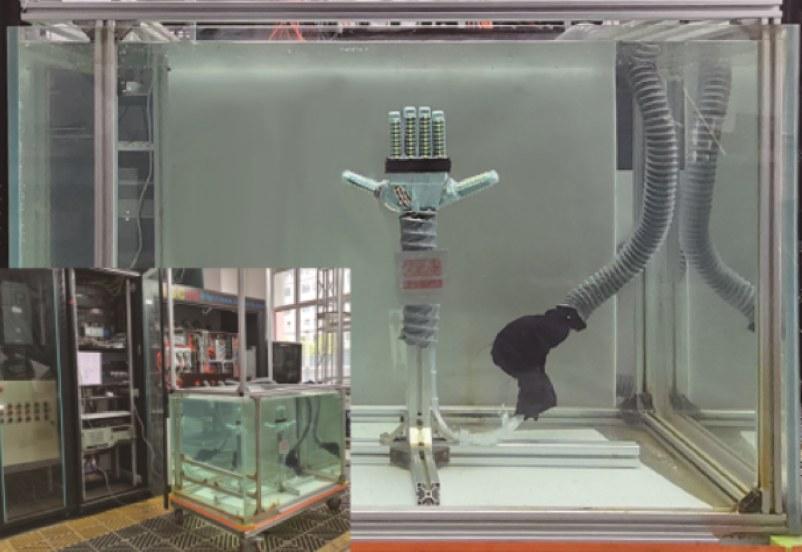
水下软体作业灵巧手
综上,仿人多指灵巧手已实现多领域、多场景的落地应用,覆盖工业生产、民生服务、医疗健康、特殊作业等核心领域。相信随着材料技术、人工智能、控制算法的持续革新,多指灵巧手将朝着高感知、高精准、高自主、高适配的方向发展,进一步拓宽应用边界。
参考来源:
陶永.仿人多指灵巧手的技术发展现状与趋势
蔡世波.机器人多指灵巧手的研究现状,趋势与挑战