中国粉体网讯 驱动控制算法作为人形机器人驱动器的核心,直接决定了关节运动的精度与稳定性,是机器人实现复杂姿态调整和动作执行的关键。然而,算法性能始终受限于底层硬件载体,由于电机驱动与液压驱动的物理原理存在本质差异,二者的技术发展路径呈现出不同侧重。

对于电机驱动,从传统的“控制器+驱动器”分立方案,到以高性能主控芯片、集成化驱动芯片为基础的紧凑化设计,再到追求更高带宽、更低延迟的“驱控一体化”趋势,底层硬件平台的变革为上层算法的不断创新提供了坚实基础。
相对而言,液压驱动依赖高动态伺服阀与为小型液压缸的制造精度,其控制算法的研究更多聚焦于系统的非线性与对外部干扰的处理
电机驱动控制算法
电机驱动的人形机器人通过精确控制多个电机,实现复杂的运动与姿态调整。目前,人形机器人的电机驱动控制算法已形成相对成熟的技术体系,并正逐渐从传统的模型驱动控制,向能够应对各类不确定性的智能控制方向演进。
传统的模型驱动控制方法以电机的精确数学模型为基础,是实现高精度控制的核心支撑,其通常通过独立的控制单元与驱动单元协同实现。其中,控制单元负责执行复杂的坐标变换、PI调节器等控制算法,驱动单元则负责接收控制信号并驱动电机运转。具体而言,模型驱动控制方法可进一步分为矢量控制、直接转矩控制、电流成型技术等类别。
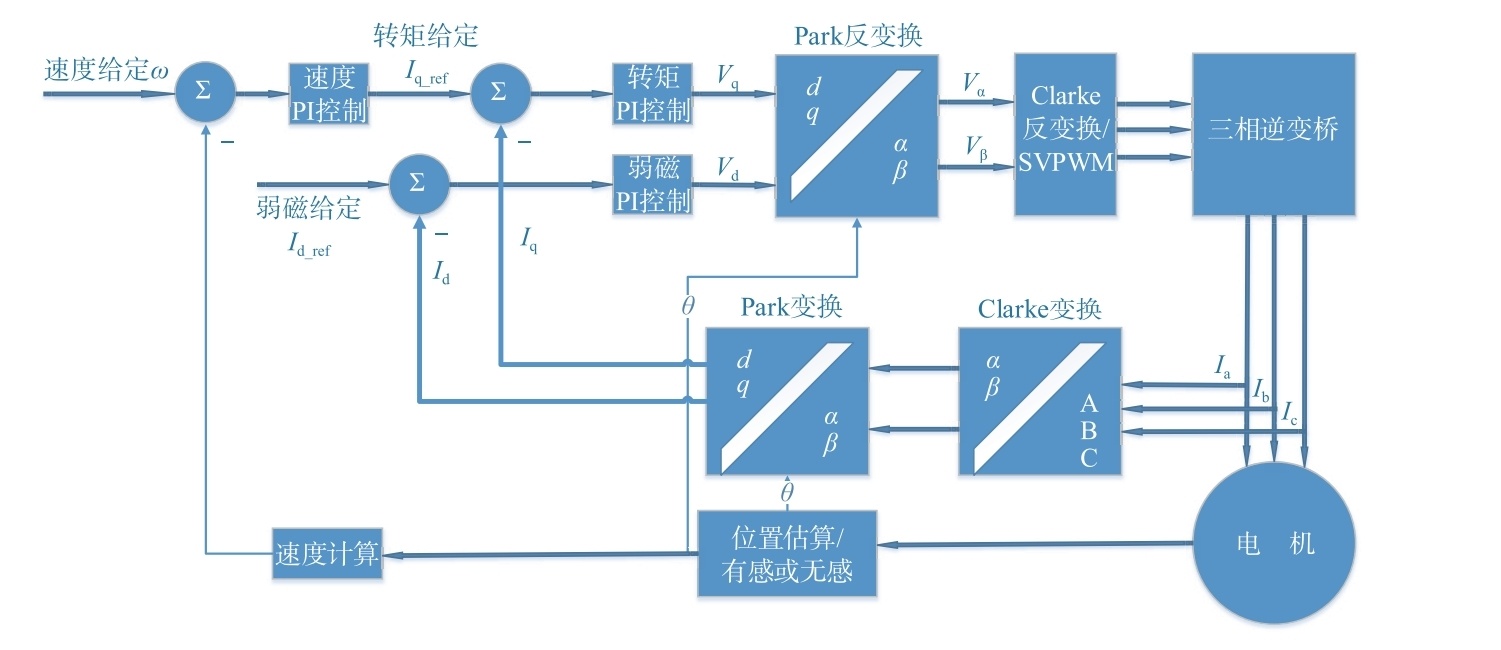
矢量控制架构
在各类模型驱动控制方法中,矢量控制通过对转矩与磁场分量进行解耦控制,在永磁同步电机和无刷直流电机上实现了平滑的宽范围调速,同时有效降低了转矩波动,具备较高的控制精度。直接转矩控制则采用直接调控定子磁链与电磁转矩的方式,其结构简单、动态响应迅速,但存在转矩脉动相对较大的不足。为进一步提升控制性能,电流成型技术等优化方案被提出,该技术通过优化相电流波形,可有效抑制转矩脉动,弥补相关控制方法的缺陷。
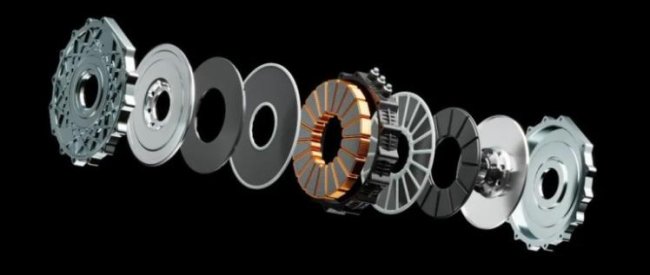
一体化关节电机 来源:汉盟动力
但总体而言,传统的模型驱动控制方法严重依赖电机参数的准确性,在面临人形机器人运动中常见的参数时变、非线性摩擦以及柔性元件引入的谐振等未建模动态时,其控制性能会出现显著下降,为克服模型依赖的局限性,研究者们将神经网络、强化学习等数据驱动方法应用于电机驱动,同时,在硬件层面,“驱控一体化”成为核心发展趋势,控制单元与驱动单元被集成到单一模块,并能在芯片中集成多核处理单元,这在极大缩小驱动器体积和重量的同时,为这些数据驱动算法提供了强大的硬件平台。
液压驱动控制算法
与电机驱动不同,液压驱动人形机器人凭借高功率重量比和高动态响应的优势,在重载、高速场景中具有独特价值,但液压伺服机构是由外置油管、液压泵站、阀门和执行器等组成的复杂耦合系统,其控制算法需重点应对系统非线性与外部干扰,包括伺服阀流量非线性、执行器摩擦非线性以及模型和参数的不确定性等。
经典PID控制方法因易于实现、成本低廉,在液压驱动控制中应用广泛,它通过对液压执行器进行线性化建模实现控制,但线性化假设难以捕捉液压系统全工况下的复杂动态特性,在大范围运动、高速响应或负载剧烈变化时,控制精度和动态性能会显著下降,无法满足高性能人形机器人的严苛要求。
为了克服经典PID控制在处理液压系统非线性和不确定性方面的局限性,并提升液压驱动人形机器人的运动性能,研究者们提出了多种先进的控制策略,其中自适应控制和鲁棒控制是应对参数不确定性的重要方向。Li等在经典PID控制中引入自适应模糊控制方法,通过模糊逻辑系统在线调整PID参数,以补偿系统参数的不确定性,在一定程度上提升了控制器的适应性和跟踪性能。然而,当不确定的非线性发展成为影响控制性能的主要因素时,液压系统的跟踪精度可能无法得到保证,Zhou等人提出了自适应鲁棒控制,将鲁棒控制和自适应控制结合起来处理不确定性,增加了自适应控制的鲁棒性并提高跟踪性能。
此外,扰动观测器与前馈补偿的结合,也是提升液压伺服系统抗扰性能的关键途径。这些策略为高性能液压驱动人形机器人的实现奠定了理论基础,但液压伺服系统的复杂性和不确定性仍未完全解决,设计高效、智能且易于工程实现的控制算法,仍是该领域的核心研究课题。
总的来说,人形机器人电机驱动与液压驱动控制算法虽演进路径不同,但最终目标一致,均是追求控制的高效性与精准性,以提升机器人运动性能,确保其高效准确地执行运动控制层指令,驱动关节达到指定位置。电机驱动控制算法依托成熟技术体系,向数据驱动方向稳步推进;液压驱动控制算法则聚焦系统非线性与外部干扰,向自适应、鲁棒控制方向不断突破,二者协同发展,为人形机器人的产业化应用提供了重要技术支撑。
来源:
李新宇.人形机器人驱动控制关键技术研究现状与展望