仿人多指灵巧手作为机器人实现精细操作与智能交互的核心部件,其设计与制造融合了机械工程、传感技术与智能控制等多学科前沿成果,是衡量机器人智能化水平的关键标志,其整体架构通常包括驱动、传动、感知与控制四个子系统。
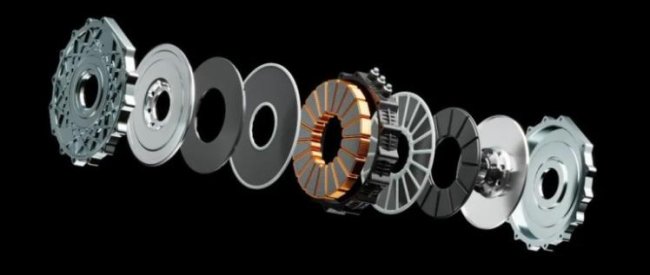
驱动系统
驱动系统是仿人多指灵巧手的“动力心脏”,为手部各关节的运动提供源源不断的动力支持,其性能直接决定了灵巧手的响应速度、负载能力与动作灵活性。目前,灵巧手的驱动方式主要分为三类:微型电机、气动元件或新型智能材料驱动。其中电机驱动以响应快、易控制的特点被广泛使用,而气动与形状记忆合金驱动在轻量化与柔顺控制方面具有独特优势。

气动软体灵巧手
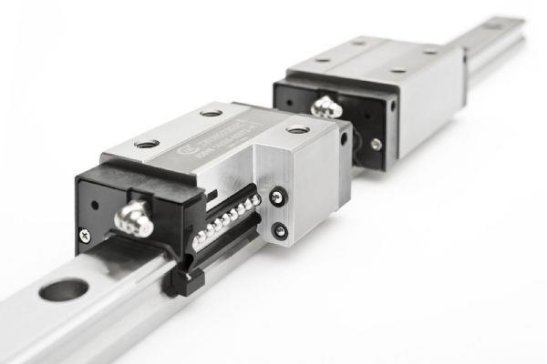
传动系统
传动系统作为动力传递的“桥梁”,承担着将驱动系统的动力精准传递至各手指关节的重要职责,是保障灵巧手动作精度的核心环节。由于灵巧手内部空间有限,对传动结构的紧凑性、灵活性与精度提出了极高要求。在各类传动方案中,腱绳传动因结构紧凑、布置灵活而应用最为普遍,齿轮与连杆结构则在高刚度和高精度操作中更具表现。近年来,刚柔耦合与混合传动方案的发展在兼顾精度与柔顺性方面展现出良好潜力。
感知系统
感知系统是灵巧手与外界环境交互的感知神经,其发展水平直接决定了灵巧手的环境适应性与操作安全性,已从早期单一的力觉检测,逐步升级为多模态融合感知系统。通过在指尖、指腹及掌面集成触觉、力觉、视觉与接近觉等传感单元,灵巧手能够实时感知接触状态、外力分布及物体属性,为闭环控制和自适应操作提供信息支持,使灵巧手能够像人类手部一样,根据接触对象的变化灵活调整操作力度与姿态,避免对物体造成损坏,同时提升操作的稳定性。
控制系统
控制系统则是灵巧手的智能核心,承担运动规划、动态调整与协调控制等功能。传统基于模型的控制方法正逐步被结合视觉伺服、力位混合 与学习控制的策略所取代,使灵巧手能够在不确定环境中实现稳定、柔顺的操作。同时,模块化与分 布式控制的架构设计提升了系统的扩展性与维护 性,使灵巧手具备更强的通用性与可移植性。
四大子系统的高效协同,构成了仿人多指灵巧手的核心运行机制,使其能够在有限的体积内,实现抓取、搬运、装配等复杂且稳定的操作功能,在工业自动化、医疗康复、特种作业等领域展现出广阔的应用前景。然而,这种高集成度、高复杂度的设计也带来了诸多工程挑战:高集成度导致系统能耗较高,难以实现长时间续航;多部件紧密配合增加了故障发生的概率,影响系统可靠性;高精度部件的制造与装配难度大,导致制造成本居高不下。这些问题相互制约,成为阻碍仿人多指灵巧手规模化应用的重要因素,也为后续的技术研发指明了方向——通过材料创新、结构优化与算法升级,实现性能、可靠性与成本的平衡,推动仿人多指灵巧手从实验室走向实际应用。
来源:
陶永 仿人多指灵巧手的技术发展现状与趋势