关节执行器是人形机器人设计中最核心的关键部件之一,主要分为线性执行器与旋转执行器两类。
人形机器人关节模组是集成驱动、传动、传感及控制于一体的精密机构,其功能类似生物的肌肉骨骼系统,主要负责驱动与控制机器人各关节及肢体部件的运动。关节执行器以电机为动力源,通过减速器实现减速增扭,借助编码器反馈位置信息,最终由驱动器完成精准运动控制。在整个人形机器人系统中,关节执行器的性能直接决定机器人的运动能力、负载能力、动态响应特性及整体系统成本,是机器人设计中至关重要的核心部件。
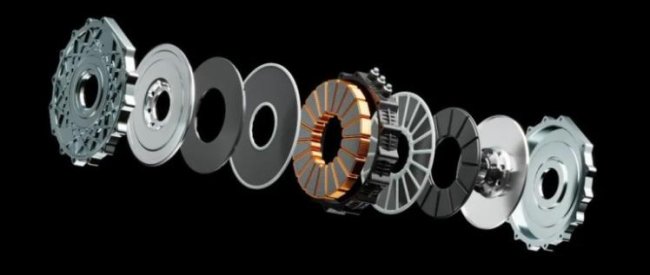
旋转执行器可实现绕单轴旋转,输出旋转运动,使人形机器人可以完成各种角度的旋转动作,通常应用在需要高扭矩的关节处,例如肩关节、腰部、髋关节等。从价值量来看,旋转执行器中,减速器、力传感器、无框力矩电机成本占比相对较高。
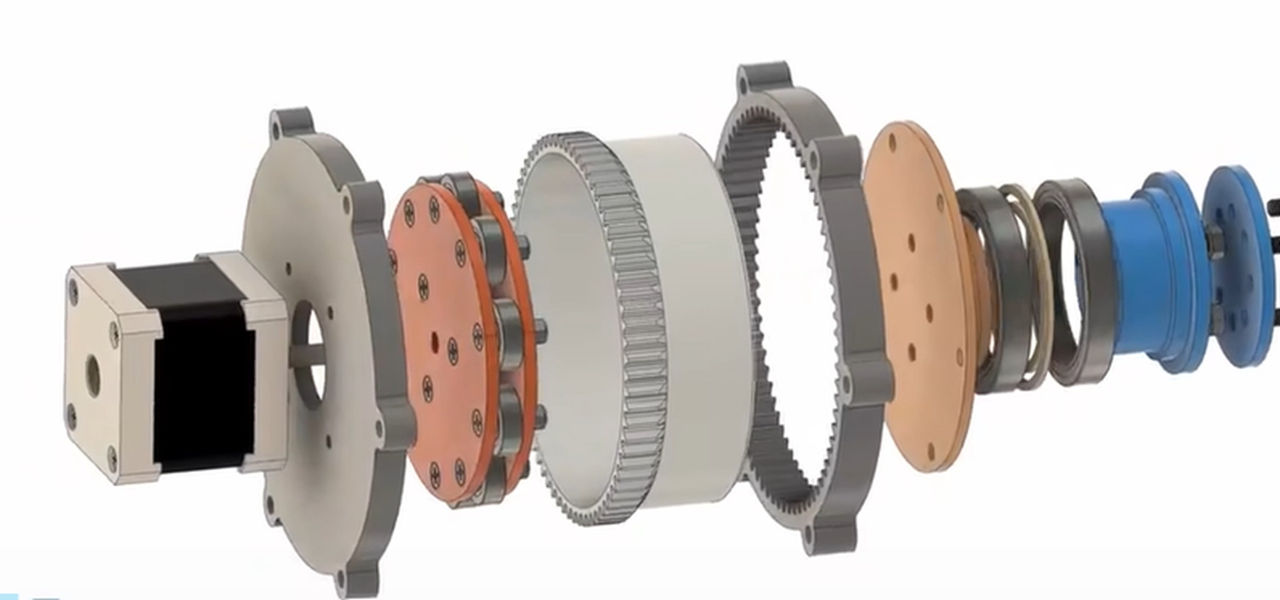
谐波减速器实物爆炸图 来源:Cytech Engineer,浙商证券研究所
目前机器人关节主要采用谐波减速器、行星减速器、RV减速器三类方案,适配不同负载与精度场景。精密行星减速器结构紧凑、效率高,但单级传动比有限;RV减速器承载强、刚性好,多用于机座、大臂等重载关节,缺点是结构复杂、成本高;谐波减速器凭借高精度、小体积优势,已经成为人形机器人旋转关节的主流选择。

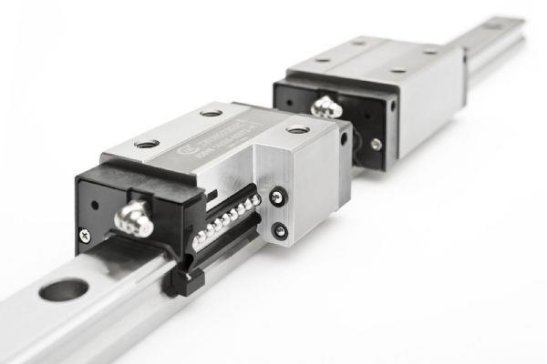
不同减速器应用场景 来源:浙商证券研究所
从主流厂商方案也能印证谐波减速器的主导地位。特斯拉Optimus旋转执行模组用14个谐波减速器,手部搭配行星减速器;智元A1、优必选、傅利叶均以谐波为核心,局部辅以行星减速器。不同人形机器人厂商所采取的方案有所差异,但大多机电一体化产品都是集成谐波减速器、超扁平力矩电机、总线型驱动器、编码器、制动器、智能传感器等于一体。在主流厂商所可能采取的减速器方案中,谐波减速器的使用仍然是主流。
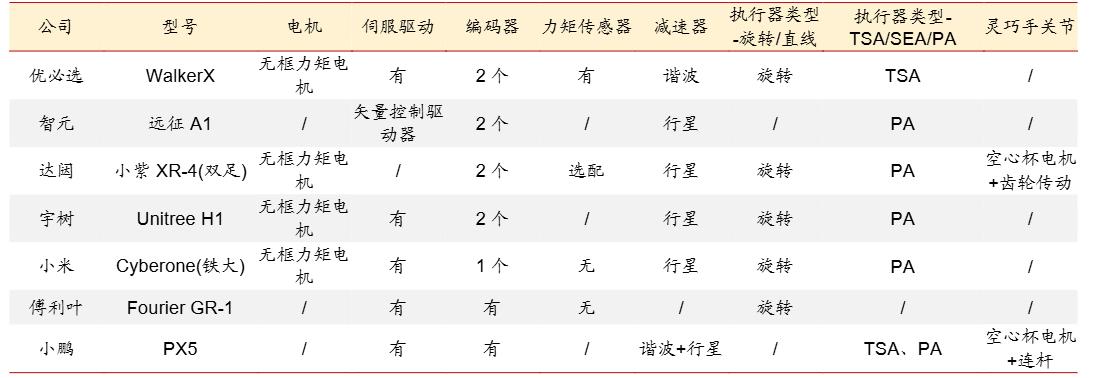
国内主流人形机器人执行器方案 来源:浙商证券研究所
值得注意的是,减速器作为人形机器人旋转关节的核心部件,其技术壁垒贯穿研发、生产、检测全流程,成为制约人形机器人产业化落地的关键瓶颈之一。无论是主流的谐波减速器,还是重载场景必备的RV减速器,其核心技术均高度依赖长期的研发积累与工艺沉淀,谐波减速器的柔轮材料制备、齿形设计与微米级加工精度,RV减速器的摆线针轮配合精度与复杂装配工艺,均对企业的技术实力提出极高要求,且核心技术与专利长期被国际巨头垄断,国内企业虽在谐波减速器领域实现部分突破,但在高端产品的寿命、可靠性与批量一致性上仍有差距,短期内难以实现全面赶超。这种技术壁垒不仅决定了减速器的高价值占比,更直接影响人形机器人的性能上限与国产化进程,也进一步凸显了减速器在人形机器人旋转关节乃至整个机器人产业中的核心壁垒地位。
参考来源:
各企业官网,浙商证券研究所
Cytech Engineer.面向人形机器人的谐波减速器及其ADI驱动与控制方案