人形机器人的发展进步需要本体结构的持续优化与核心零部件的突破,既要打造适配多种应用场景的机械躯体,也要凭借高性能的零部件持续运行。
人形机器人本体的设计面临多重技术挑战,既需要高强度、紧凑的机械结构,也要实现灵活性和轻量化。人形机器人通过应用高强度轻量化材料(如PEEK材料和碳纤维复合材料)与仿生学设计,实现重量与耐久性的平衡。优化的骨架拓扑结构和多自由度关节设计,使得机器人能够模仿人类的自然动作,例如,特斯拉人形机器人采用PEEK材料,将总重量控制在57kg以内,同时耐久性提升20%。此外,能源系统和多模态传感系统的集成设计,使机器人能够在有限的体积中有效整合电池、传感器和控制模块,以应对多样化的任务需求,有效权衡运动平稳性、灵活性与系统续航能力。
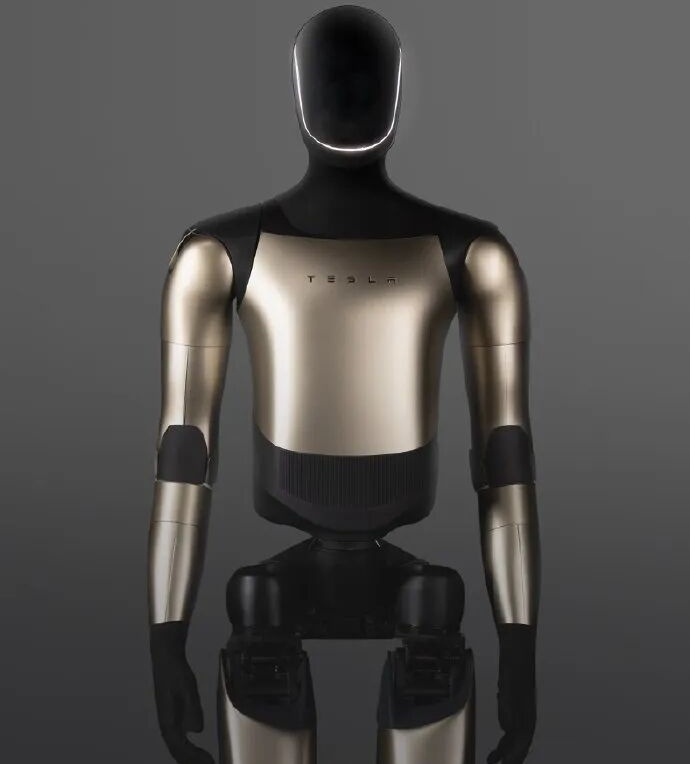
来源:特斯拉
各种各样的零部件是人形机器人实现感知、运动与交互的基础,主要包括减速器、伺服电机、高性能控制器、灵巧手等。
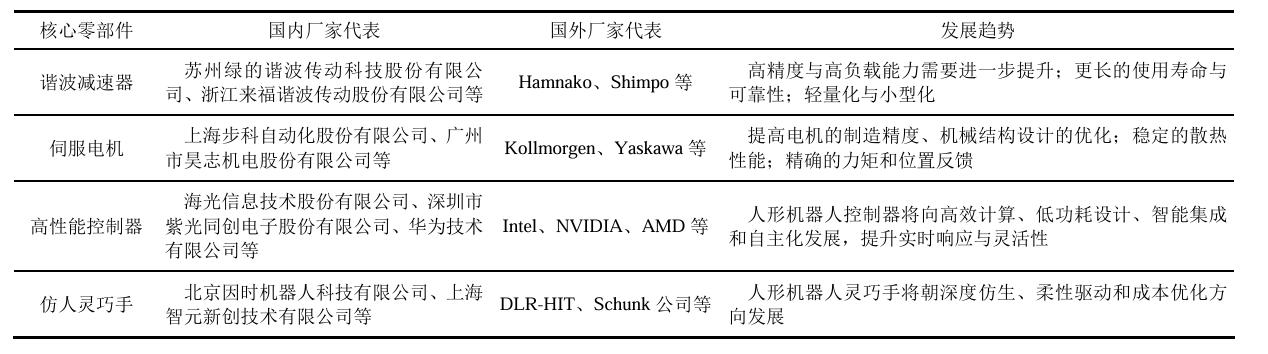
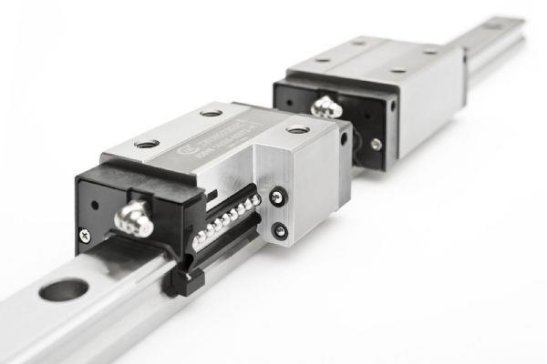
其中,谐波减速器是人形机器人旋转关节电机的核心传动部件,凭借高传动比、高精度的优势,非常适合作为人形机器人关节的核心传动部件,但其在高频工作下易发生疲劳损伤。当前的研究集中在提高材料耐久性及减速器设计的优化,以提高其在长期运行中的效率和精度,目前领先产品的定位精度基本可达到±0.05°以内,较好保证了人形机器人的操作精度。国内方面,绿的谐波已成长为绝对龙头,近年来发展势头迅猛。国外则以哈默纳克为主要代表。
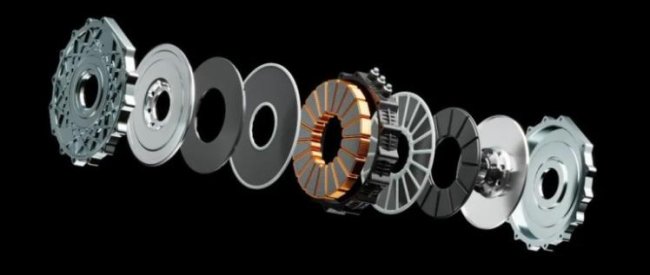
伺服电机是人形机器人动力输出核心,保证机器人的运动精度与稳定性。国内以上海步科、广州昊志机电为代表,国外则有科尔摩根、Yaskawa等企业。其中,无框力矩电机凭借高精度优势被大多数机器人厂商应用于转转关节和线性关节。目前,稳定的散热性能是主要研究重点,研究人员正在开发新型散热系统,如液冷技术以应对这一问题。同时,制造精度对电机的稳定运行至关重要,特别是在确保定子和转子间的电磁场均匀性方面,任何微小的误差都可能影响运动精度和控制稳定性。
高性能控制器作为人形机器人的“大脑”,通常采用CPU、GPU和现场可编程门阵列(FPGA)结合的架构。其中,GPU在大规模并行计算和深度学习任务(如视觉数据处理)中表现尤为优越。例如,基于英伟达Jetson AGX Orin的控制器可实现每秒275万亿次浮点运算(TOPS),支持复杂环境下的实时决策与多任务并发操作。目前,英特尔和英伟达在CPU与GPU领域处于领先地位,而国内在高性能计算架构方面仍存在差距,需要进一步推进自主研发,特别是结合人形机器人的新算力需求,开展面向应用的前沿产品自主研发。
人形机器人执行精密操作还离不开灵巧手、仿生软体夹爪等通用末端执行器。灵巧手融合了仿生学设计与多自由度控制技术,具备与人类手指相似的灵活性,能够执行多种复杂操作任务,如抓握、捏合、旋转等。国内北京因时机器人、上海智元新创,国外DLR-HIT、Schunk公司均有相关产品布局。近年来,柔性材料与多模态传感器的应用,大幅提升了灵巧手的环境适应性,但其仍面临多模态信息融合、操作稳定性不足等挑战,未来将向深度仿生、柔性驱动与成本优化方向发展。
总体而言,人形机器人本体设计正朝着更安全、更适配的方向迭代,核心零部件的国产化进程持续推进,但在高精度、高可靠性等方面仍有提升空间。不过,我相信随着材料技术、控制技术的不断突破,人形机器人从实验室走向更多的实际应用场景。
参考来源:
各企业官网