随着人工智能产业的蓬勃发展,人形机器人近些年发展颇为迅速,与此同时,业内对其关键零部件的传动精度、承载能力等性能指标提出了更高要求。反向滚柱丝杠副作为人形机器人关节部位线性执行器的核心精密传动机构,是决定机器人灵活性与负载能力的关键。
根据不同的设计结构和传动模式,滚柱丝杠副可以分为标准式、反向式,循环式、轴承环式和差动式等五种类型。
标准式滚柱丝杠副:其传动原理是丝杠的旋转来带动螺母进行轴向位移。主要结构包含多头螺纹丝杠、与之匹配的螺母及单头螺纹滚柱,其中丝杠与螺母的牙型角设计均为90°。另外,为了为确保滚柱与丝杠轴线的精确平行,滚柱两端的齿轮与固定在螺母上的内齿圈相啮合,此外,保持架用以实现滚柱的均匀排布。标准行星滚柱丝杠副具备耐受恶劣环境、高速重载与大行程、长时间正常工作的优势。
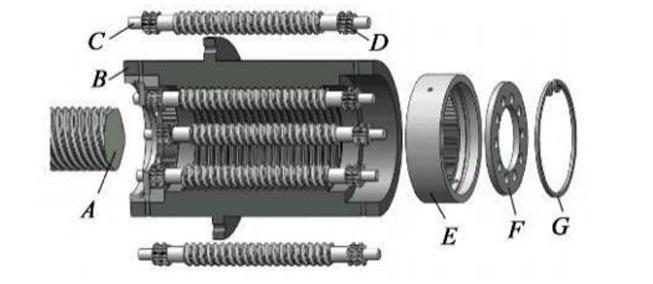
标准式滚柱丝杠副
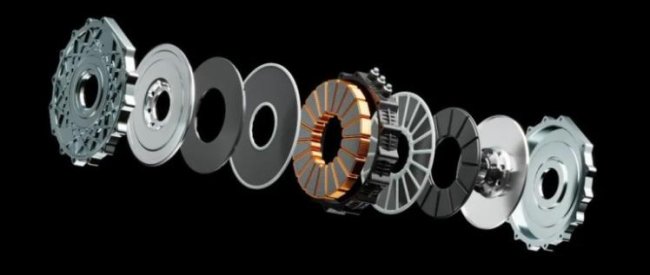
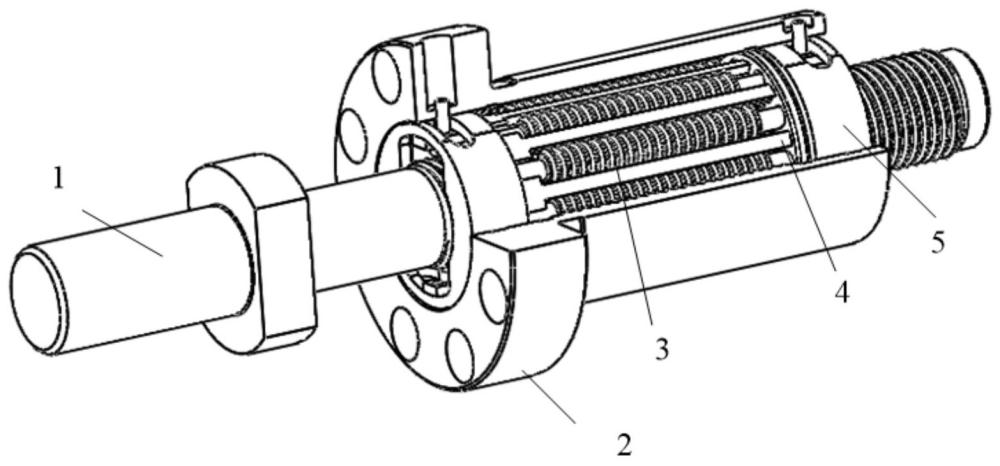
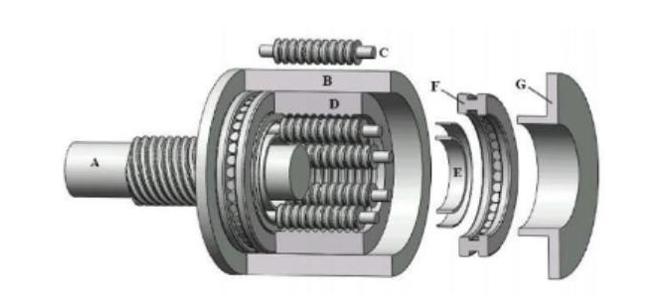
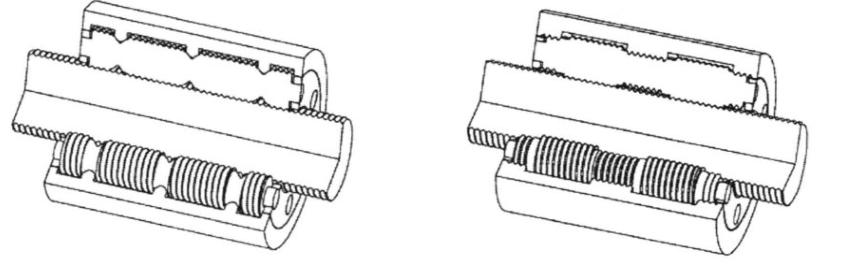
反向式行星滚柱丝杠副:结构与工作机理上同标准式基本相似,核心区别主要体现在驱动方式上。标准式的由丝杠驱动,而反向式由螺母驱动。从而驱动丝杠产生轴向位移。反向滚柱丝杠副最突出的优势在于,其螺母可以设计成电机转子,实现驱动单元与传动机构的一体化集成。

反向式行星滚柱丝杠副
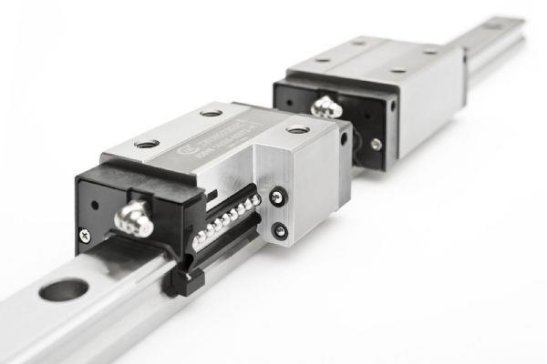
反向滚柱丝杠副的高性能线性执行器凭借其高强度、高承载的特性,已成为业内的主流技术方案之一,其传动精度、承载能力决定了机器人性能的优劣。例如特斯拉Optimus、KEPLER-K2、Figure AI的Figure 01等前沿人形机器人便大量采用定制化的反向滚柱丝杠副来驱动其高负载关节。
我认为随着人形机器人行业的迅速发展,反向滚柱丝杠的需求将会更加旺盛,由此也会推动国内滚柱丝杠产业链加速国产化替代,同时带动精密加工、材料制备、规模化量产配套环节快速成熟,从而进一步缩小与海外品牌的技术差距。

反向滚柱丝杠副应用于人形机器人小腿关节
循环式行星滚柱丝杠副:该构型在工作机理上与标准式相近,但其核心区别在于滚柱,其并未使用螺纹,而是采用了一系列与滚柱轴线垂直的环形凹槽,其间距由丝杠及螺母的螺距决定。这一独特的非螺纹承载设计,使其可以有更高的定位精度与负载能力。凭借上述优势,循环式行星滚柱丝杠副被广泛应用于对精度和刚度要求较高的场合。不过,其在运行中反复承受加载与卸载的循环应力,易导致结构的疲劳破坏。
循环式行星滚柱丝杠副
轴承环式行星滚柱丝杠副:滚柱拥有类似于循环式结构滚柱一样的沟槽设计。在该机构中,动力从丝杠输入,依次通过滚柱和螺母,最终将载荷传递给位于螺母两端的推力滚子轴承,这些轴承再将力作用至螺母壳体,驱动其实现线性位移。该结构的特点是轴承环的旋转,能有效均化摩擦,进而抑制了高速工况下的升温速率,提高传动效率。
轴承环式行星滚柱丝杠副
差动式行星滚柱丝杠副:核心构造上与标准型一致,同样由丝杠、螺母和滚柱这三大基本单元组成。与标准式不同的是,差动式行星滚柱丝杠副打破了三大部件牙型角的统一性。其三大部件的牙型角被设定为互不相等的值,以此来调整滚柱在丝杠及螺母螺纹内的接触位置。
差动式行星滚柱丝杠副
参考来源:
刘明鑫.行星滚柱丝杠参数设计及有限元分析
吴贵成.短时高承载反向式行星滚柱丝杠副关键技术研究
张彤威.仿人形机器人高比功率反向滚柱丝杠副结构设计与性能研究