近两年,人形机器人行业发展迅速,灵巧手作为人形机器人的一种末端执行器,需要具备接近人手的自由度和承载能力,灵巧手关节用的减速模组必须满足轻量化和小型化的严苛要求。
当前灵巧手关节配备的减速模组一般是锥齿轮设置在关节,减速机和驱动电机设置在手指指段内,减速机和驱动电机直连,且驱动电机通常为轴向长度较大的径向磁通结构,这种结构占据的空间较大,由此就会导致灵巧手的手指比实际人手大很多,越来越无法满足手指关节轻量化和小型化的使用需求。
同时,由于灵巧手关节内部空间非常有限,关节模组的各部件组件都很小,制造困难,特别是内置齿轮精度管控严苛,整机装配工序非常繁杂,从而容易导致整个关节模组的传动误差大,传动精度低,无法达到人手一样的扭矩、精度和速度等能力。
基于以上背景,鑫君传动近日公开了一篇名为“一种人形机器人灵巧手关节用RV减速模组”的新专利,该专利主要针对传统灵巧手关节模组体积过大、传动精度不足的行业痛点,为灵巧手关节减速模组的设计提供了新的路径。
在模组采用同轴设置的驱动电机与RV减速机,驱动电机为轴向磁通的PCB电机,包括电机壳体,电机壳体内安装有输入轴以及与输入轴同轴设置的永磁体转子、两个PCB定子,两个PCB定子分别位于永磁体转子两侧。
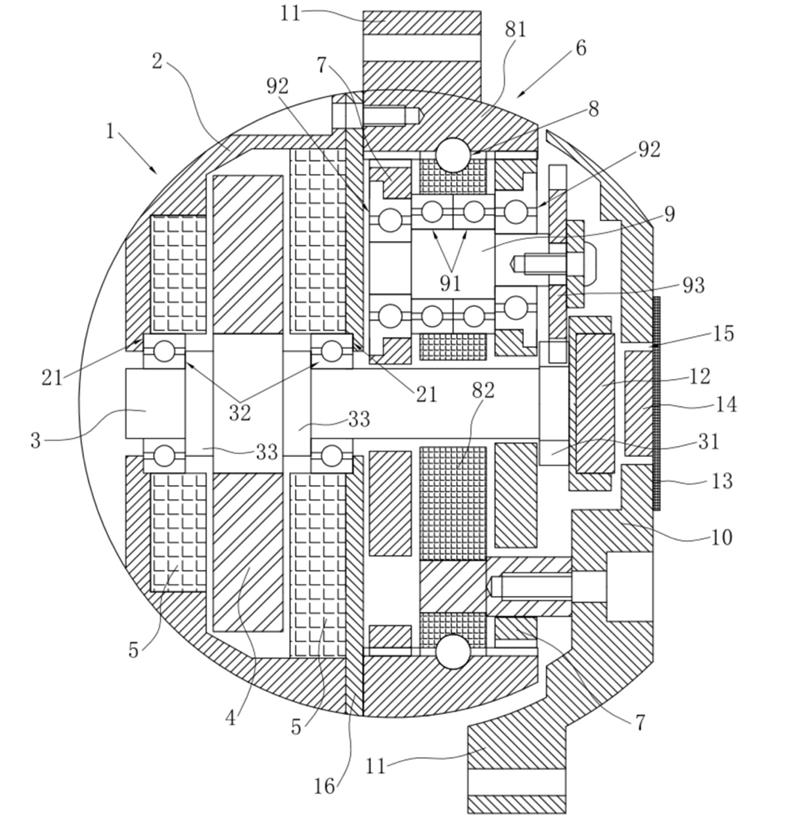
相较于传统径向磁通电机,其轴向厚度大大减小,而RV谐波减速机在两个摆线轮之间直接设置主轴承进行支撑,且利用主轴承的外圈直接作为固定端或输出端,可直接取消现有RV减速机中的输出轴、输出盘架、针齿壳及其之间的安装轴承等结构,进一步压缩了整体体积。
此外,为了更好的去适配灵巧手关节的外形需求,电机壳体、连接隔板、主轴承外圈与端盖共同构成类球形结构,接近人手关节形态,提升美观度,主轴承外圈与端盖外壁设有安装凸耳,便于与手指指段连接,且不增加整体体积。同时,输入轴端部安装编码器,端盖设置读数头与让位孔,实现输入精度的实时监测,进一步优化传动性能。
当前,RV减速器主要用于人形机器人腿部等重载关节,在灵巧手这类轻量精密关节中应用较少,但我认为随着国内越来越多相关研究的问世,也将为RV减速器的小型化、专用化提供一些新思路,进一步推动人形机器人核心零部件实现高水平国产化突破。
来源:
顾京君.人形机器人灵巧手关节用RV减速模组